机械原理题:拆出杆件组,判断机构级别(图中画箭头的构件为原动件).
来源:学生作业帮助网 编辑:作业帮 时间:2024/11/11 15:48:46
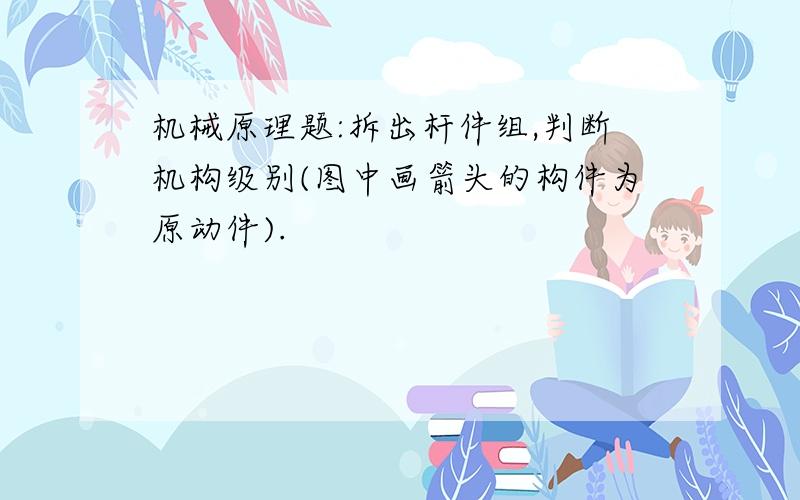
III级杆组,首先这个机构有一个自由度,然后没有高副,拆去原动件1后,观察剩余的组成为4个杆件和6个低副,并且其中一个杆件2有三个低副,符合III级杆组的条件再问:为什么不能是4和5构成II级干租,两
我只有07年的,
资料下载网址:大学空间站(百度不让回答有网址的贴,所以没法给准确的资料地址)下载方法:百度搜索下“大学空间站”,打开该网,注册大学空间站会员,下载.学习资料下载网站介绍:大学空间站---专为大学生打造
三角形是什么呀
因为中间三根杆构成复合铰连接,3-1=2,懂不?
我想你是在符合教练处少数了复合铰链2个,两个移动副,一共四个之前两个转动副之后一个转动副再之后一个转动副,两个移动副再问:复合铰链的地方您帮我拆开说一下呗。还有就是所谓的转动副或者移动副是针对相连的两
活动件8个(滚子转动是为了减小高副元素的磨损,不影响其他构件运动,是局部自由度,等效为滚子和三脚架为一个构件来处理);低副11(复合铰链算两个低副);高副1个.F=3*8-2*11-1=1关键点如上已
填空题6.法面法面7.低副高副8.都是速度相同的点绝对瞬心的绝对速度为零.判断题1.×2.√3.×4.√5.√.
高低主要指的是自由度,以平面运动副为例,转动副移动副就是低副,三个自由度中限制住两个,因此谓之低副,同样三个自由度若限制住一个,也就是还剩两个自由度,因此谓之高副.
有的,但是人家不会给你的,需要自己动手做这样的公式.再问:举个例子,比如n=10,PL=13,PH=2,虚约束=0,局部自由度=1,机构的自由度算出来=1,那机构的级别是多少再答:你这里的“n,PL,
超声波焊接机的工作原理超声波焊接装置是通过一个电晶体功能设备将当前50/60Hz的电频转变成20KHz或40KHz的电能高频电能,供应给转换器.转换器将电能转换成用于超声波的机械振动能,调压装置负责传
由于KL、FI、CD平行,ID//CF//FJ,可将机构进行简化,只余ABDCE部分,然后对其进行机构自由度计算:5N-7X2=15个杆件,铰链4个,复合铰链1个,移动副1个,因此自由度计算结果为1.
看过教自由度的判断的两杆的点连接、杆块的滑动连接是低副转子滑动连接是高副
构件就是由机械原理中的几个连在一起相对不动的零件组合而成.构成一个运动整体.构件就是由机械原理中的几个连在一起相对不动的零件组合而成.构成一个运动整体.构件就是由机械原理中的几个连在一起相对不动的零件
对!包括齿轮传动,结构力学等等机械原理.比如说:自行车的踏脚用到了杠杆原理.以飞轮的轮轴为支点,用较长的铁杆来转动链条上的飞轮,可以省力.踏脚飞轮上用到了齿轮,以防止链条打滑.自行车上的链条与车子的后
平面轮系有正负齿轮的概念,但正负的概念是相对的,内啮合齿轮转向相同,外啮合齿轮转向相反,所以两个齿轮的转向关系就是它俩连接之间外啮合数量m,然后(-1)^m就行了.空间轮系没有正负概念,画个方向就行了
2错3对4错5.对6对7.错8对9.错10错11错第九题不敢确定意思模糊11不全不敢确定
根据公式
郭敦顒回答:1,错.2,错.3,错.4,错.5,对.6,对.7,错.8,对.9,对.10,对.
要明确一个问题就是平面四杆死点位置出现在从动杆与连杆是否共线.这是关键!如果共线了那么就会出现传动角等于零,压力角等于九十度